
Experience and Credentials
Explore my resume and CV to learn more about my professional journey and expertise.
About Me
I am an Electromechanical Engineer and Roboticist specializing in hardware design, research, and development. My expertise includes designing, prototyping, and deploying advanced electromechanical systems and robotic applications, with a strong foundation in PCB design, 3D modeling, and systems integration.
Currently pursuing a Ph.D. in Electrical and Electronics Engineering at Clemson University, my research focuses on architectural robotics. Specifically, I am designing and engineering full-scale adaptive robotic systems for architectural applications. This work involves creating morphing robotic surfaces and “robotic rooms” that dynamically respond to user needs, integrating rapid prototyping, electromechanical design, and advanced bio-sensing techniques.
I also serve as the Robotics Lab Manager at Clemson's Continuum Robotics Lab (CuRL), where I oversee cross-functional robotics projects, train interdisciplinary teams on robotics tools, and ensure the seamless operation and maintenance of lab equipment.
In addition to my academic and research experience, I bring three years of industry experience as a Hardware Electrical Engineer at Fiber Mountain and as an Electrical Engineering Intern at Timex Group. I hold a Six Sigma Green Belt certification and have AGILE project management experience, further enhancing my qualifications for both R&D and project engineering roles.
Check out my resume and the project links above for more on my work, and feel free to reach out via email or LinkedIn using the links below!
Career Timeline
Bachelor's Degree in Electrical Engineering
2013 - 2017, University of New Haven

Built a strong foundation in electrical engineering principles, igniting my passion for problem-solving and technology.
Electrical Engineering Intern
2016, Timex Group

Enhanced my practical skills by working on electronic components for consumer products, gaining valuable industry experience.
Hardware Electrical Engineer
2017 - 2020, Fiber Mountain
Developed and implemented hardware designs for networking solutions, solidifying my expertise in electrical systems.
Ph.D. in Electrical Engineering
2020 - Present, Clemson University

Currently pursuing a Ph.D. with a focus on robotics and innovative electromechanical design. Designing full-scale adaptive robotic living spaces to address housing shortages from rapid population growth and space crises
Skills and Tools
PCB Design: OrCAD, Allegro PCB, SMT Soldering
3D Modeling: SolidWorks, 3D Printing
Programming: MATLAB, Microcontroller C, Linux
Project Management: Arena PLM, Agile, Jira
Six Sigma Green Belt Certified
Projects and Research
Robot Rooms Project
Introduction and User Study
The Robot Rooms project explores user-centric, adaptable environments for smart homes and healthcare facilities. The initial phase, documented in the paper “Design of Two Morphing Robot Surfaces and Results from a User Study on Expectations Towards a ‘Robot-Room’”, highlights findings from a large-scale user study.
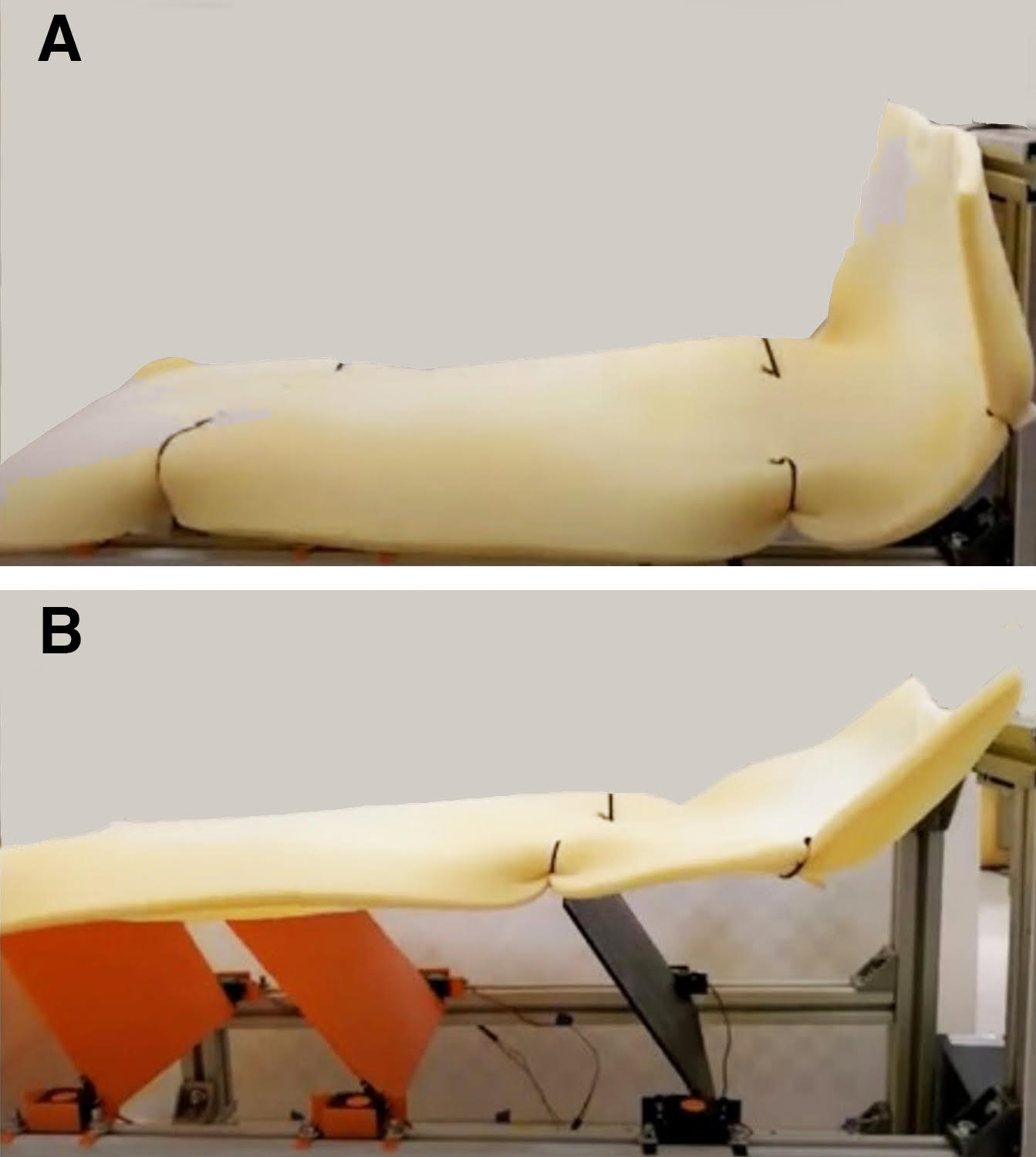
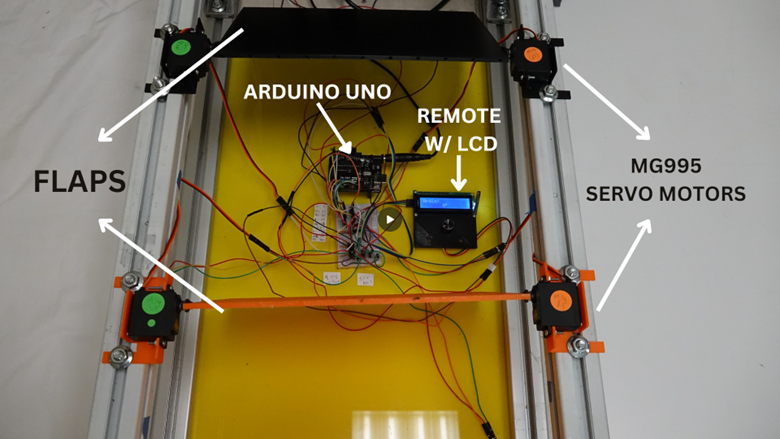
Morphing Robotic Surfaces with Continuum Elements
A key development in the Robot Rooms project is the concept of morphing robotic surfaces, which use continuum elements for shape adaptability. This phase is detailed in my paper, “A Shape-Adaptive, Robot-Surface Enabled by Flexible, Continuum Element Interaction, Shaping Human Activity”, currently under review. Images and videos will be shared upon publication.
Full-Scale Prototype Design
The project’s next phase involves a full-scale prototype, currently in the building stage. Further details, and Images are coming soon!.
Gripper Project
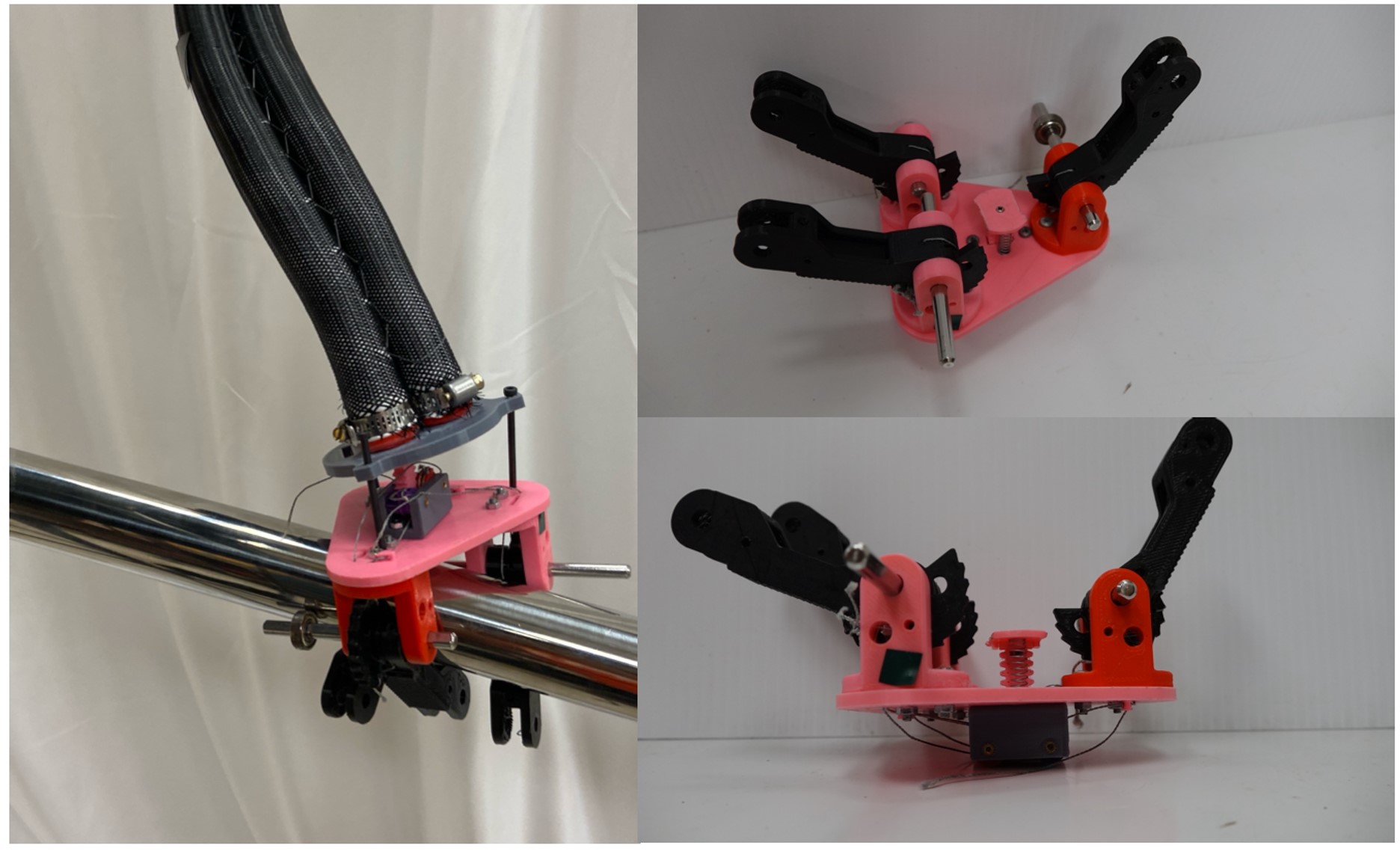
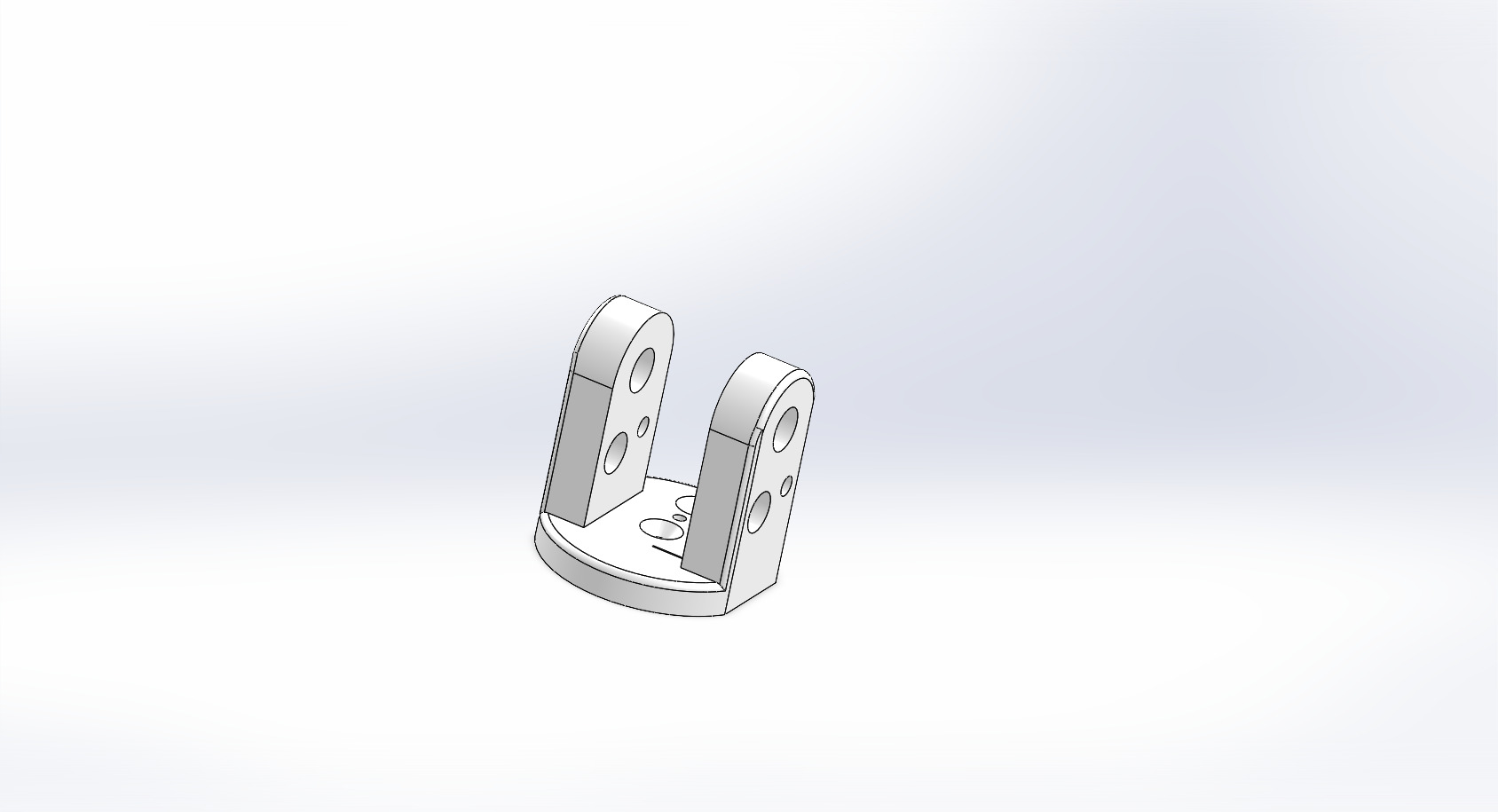
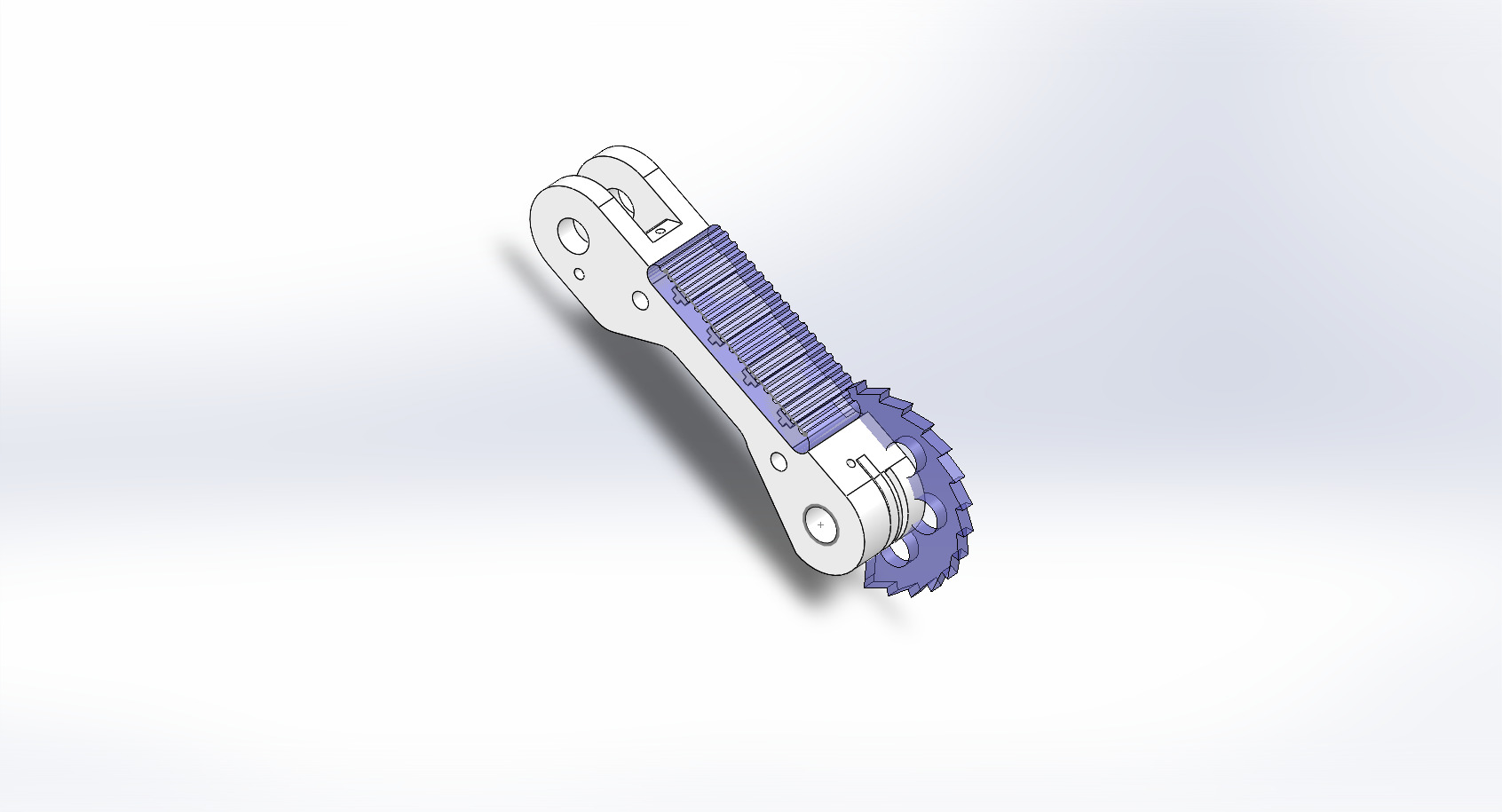
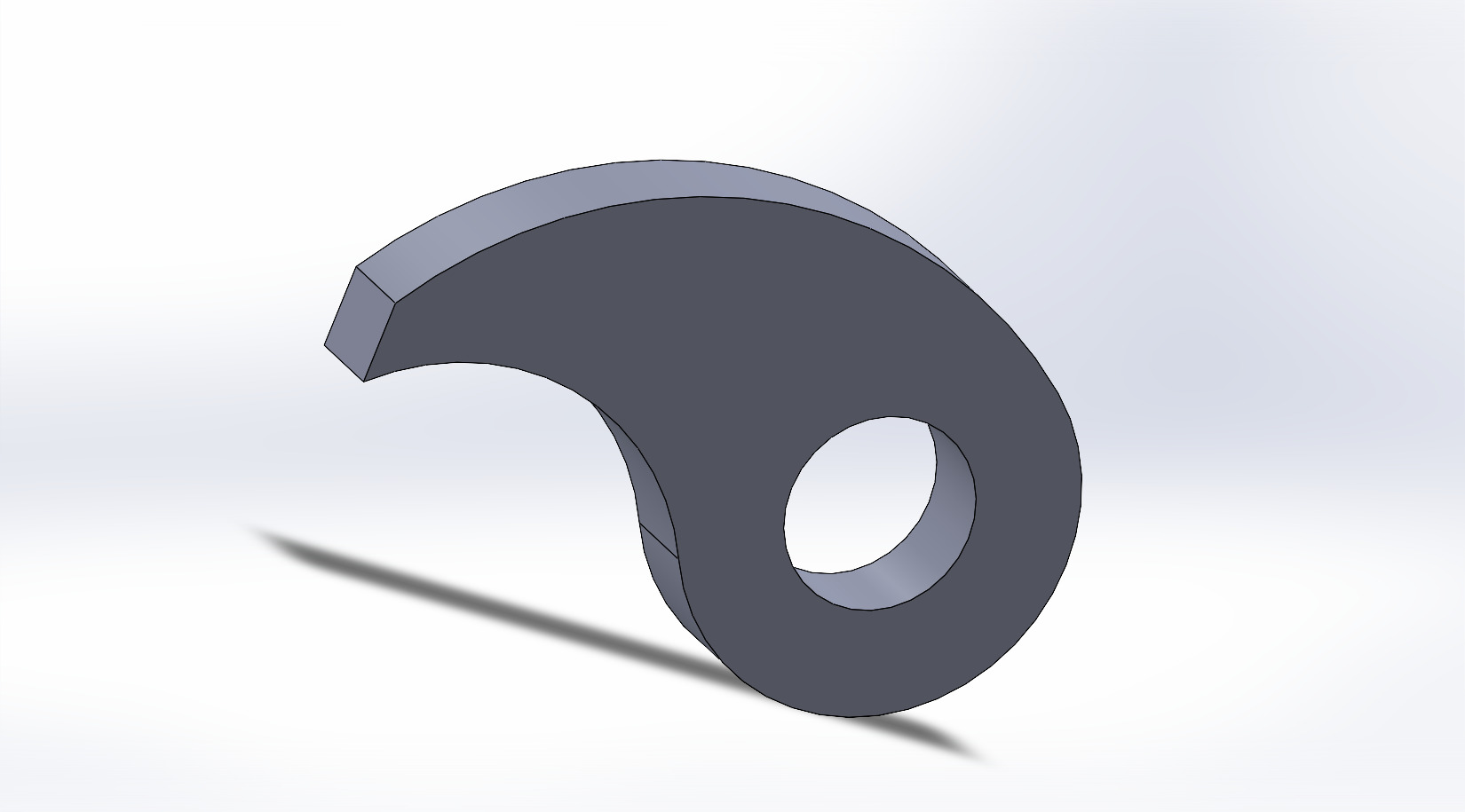
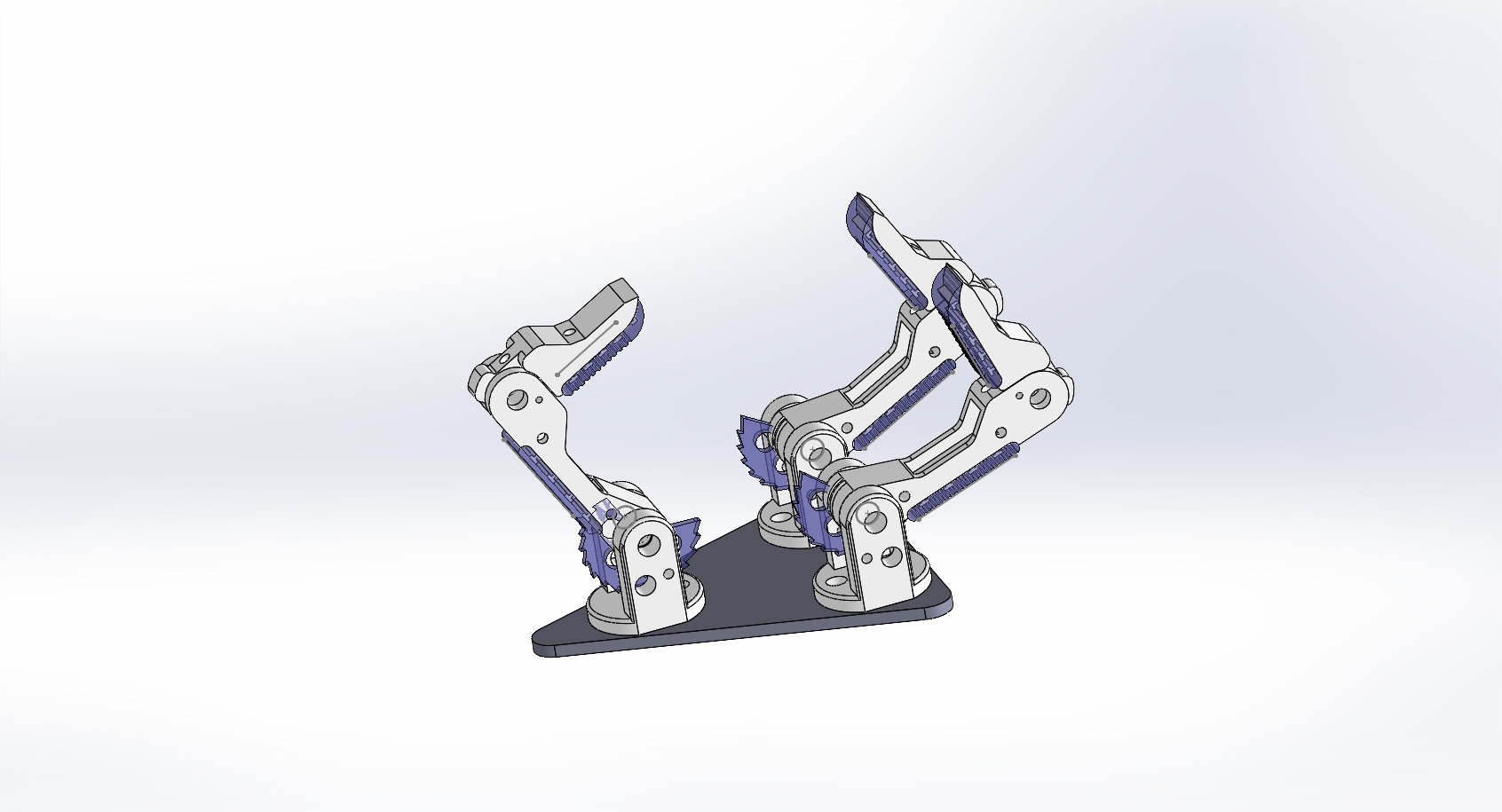
This gripper is inspired by the anisodactyl foot of an eagle, utilizing a custom-designed rack-and-pinion passive mechanism to mimic its natural gripping action. The video demonstrates the full robot as well as the passive gripper in operation. The images highlight the CAD models and assembly components that I developed to bring this innovative design to life.
Space Bridge Project
A self-deploying bridge prototype for autonomous supply transfer on the ISS.




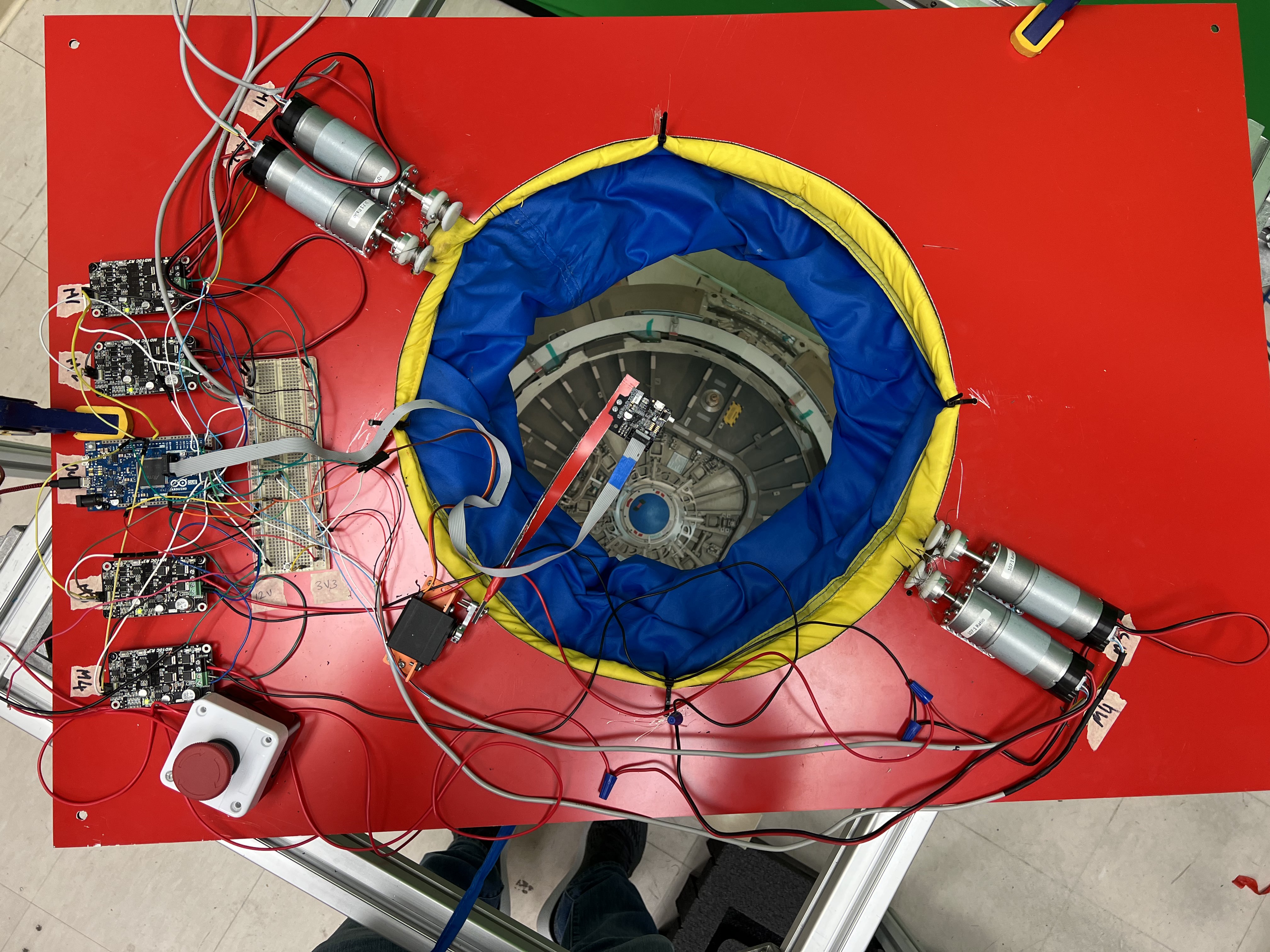
Details: This project demonstrates a conceptual self-deploying bridge prototype designed for reliable supply transfer in space environments. The video above showcases the motivation and its functionality, while the images highlight various prototype stages.
Additional Projects
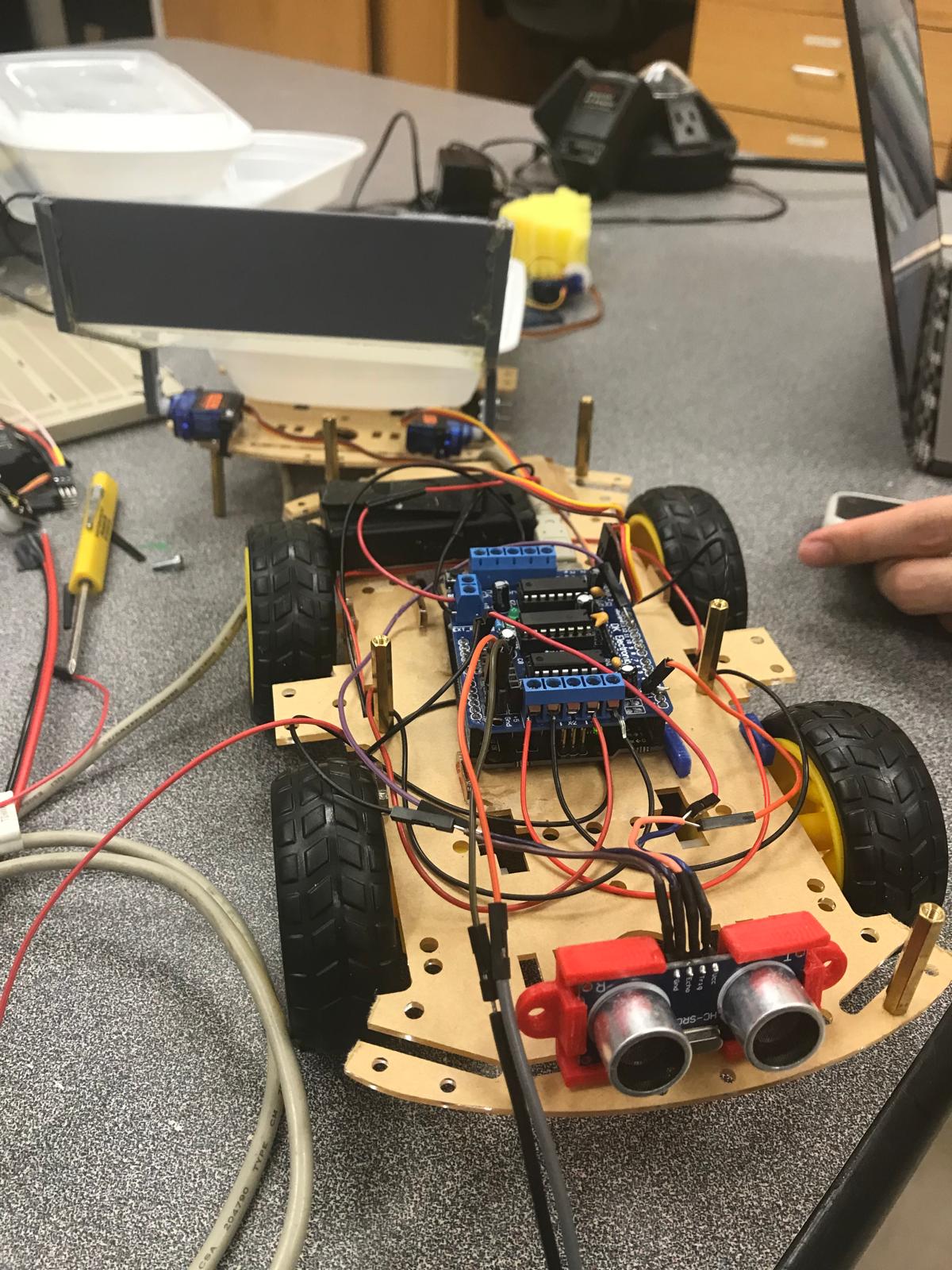
PAR: Mobile Robot for Picking Up Toys and Cleaning After Kids
A mobile robot designed to help parents by picking up toys and tidying up after children.


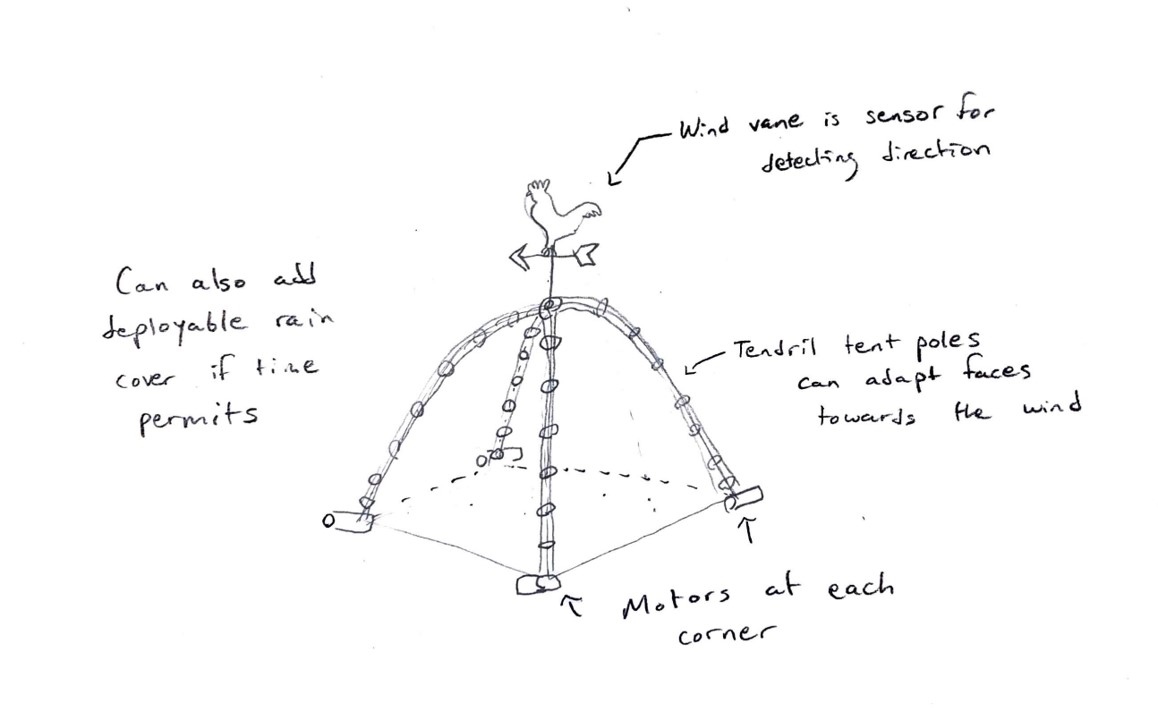
Canopy: A Tendon-Driven Self-Adjusting Tent
A tent structure that adapts to wind direction, improving stability and allowing air to flow over it aerodynamically.

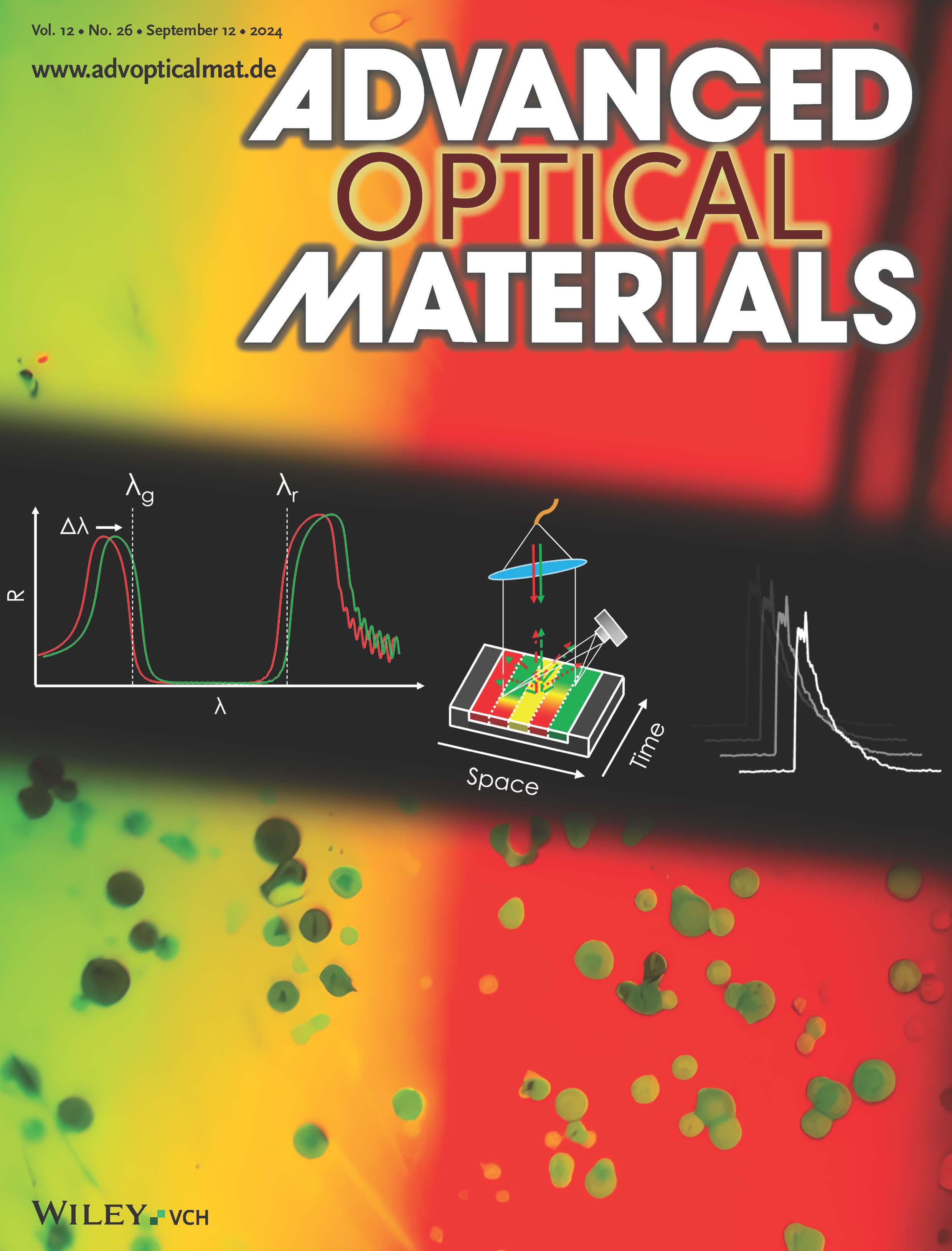
Silicon Photonics: Quantitative Dynamic Structural Color
This publication, “Quantitative Dynamic Structural Color”, was featured in the 2024 issue of Advanced Optical Materials. Highlighting innovative work in silicon photonics, the paper was selected as the cover of the issue.
Publications
Design of Two Morphing Robot Surfaces and Results from a User Study on Expectations Towards a ‘Robot-Room’
IEEE Robotics and Automation, 2024
This study explores user-centric design in adaptable robotic environments, presenting findings from a large-scale user study.
Quantitative Dynamic Structural Color: Dual-Band Hyperchromatic Sensing with Mesoporous Metamaterials
Advanced Optical Materials, 2024
This paper was featured as the cover of the issue, highlighting key developments in silicon photonics.
Soft Robotics for Fall Mitigation
ReMAR Conference, 2024
Soft Robotics for Fall Mitigation: Preliminary Design and Evaluation of a Wearable System using Continuum Robots.
Contact Me
You can reach me via email or connect with me on LinkedIn and Google Scholar:
Press and Media Coverage
New Research Could Open the Door to Quick, Simple Diagnostic Tests
This Clemson News article features my former advisor, Dr. Judson Ryckman, and myself discussing our work on nano-manufactured sensor chips. The research, which aims to make diagnostic tests more accessible with visible color changes, directly contributed to our publication in Advanced Optical Materials.
Read the full article